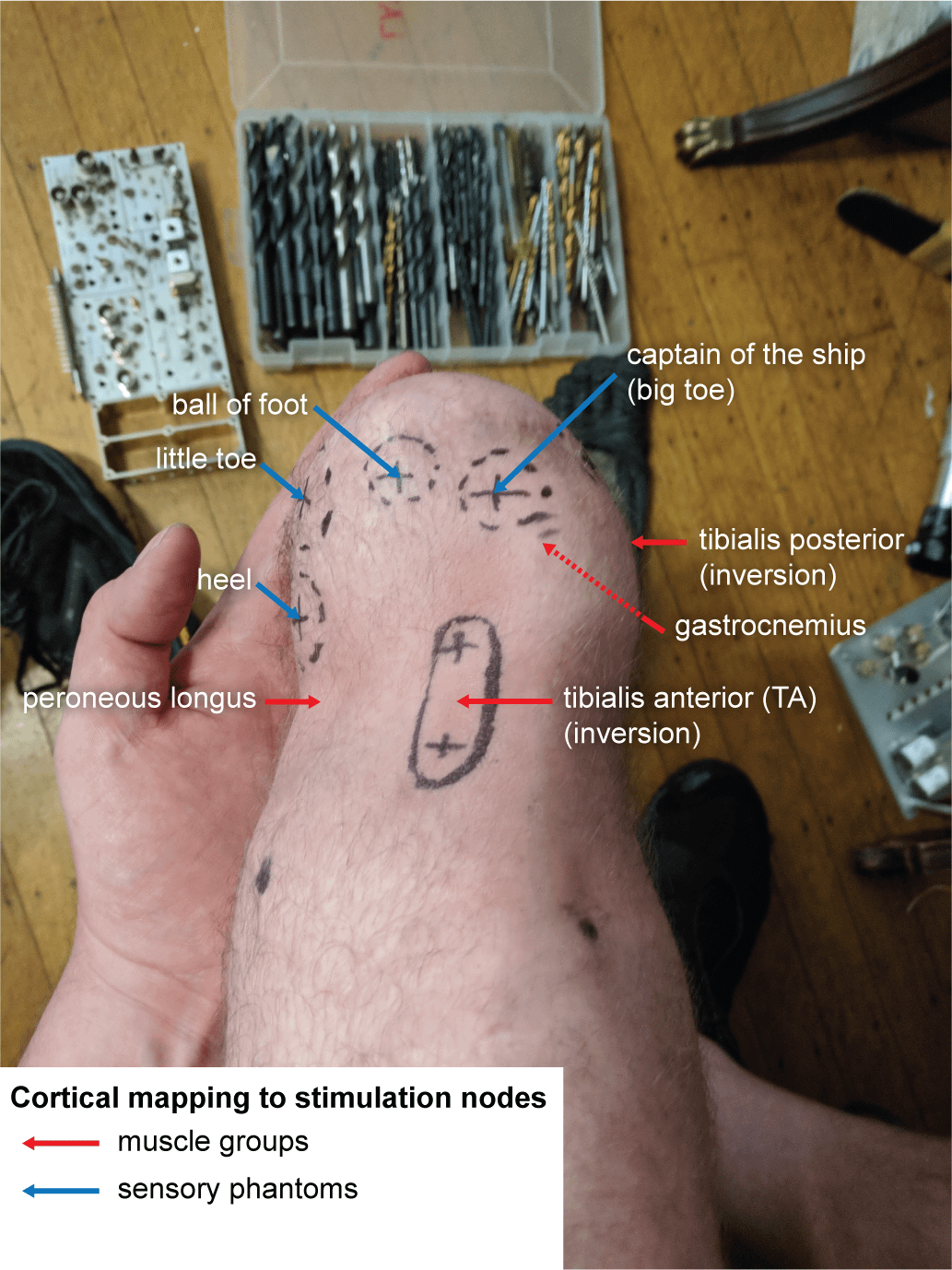
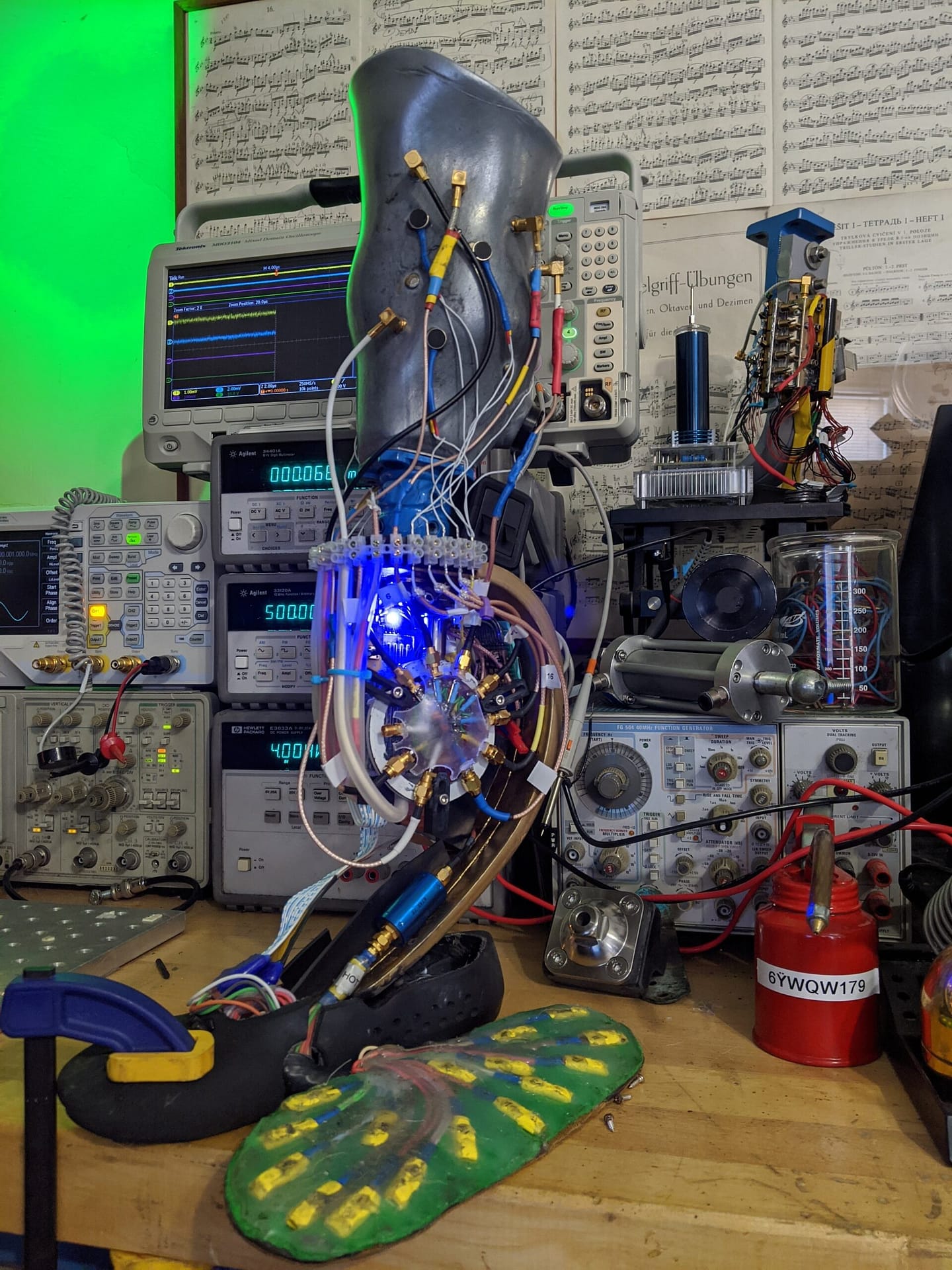
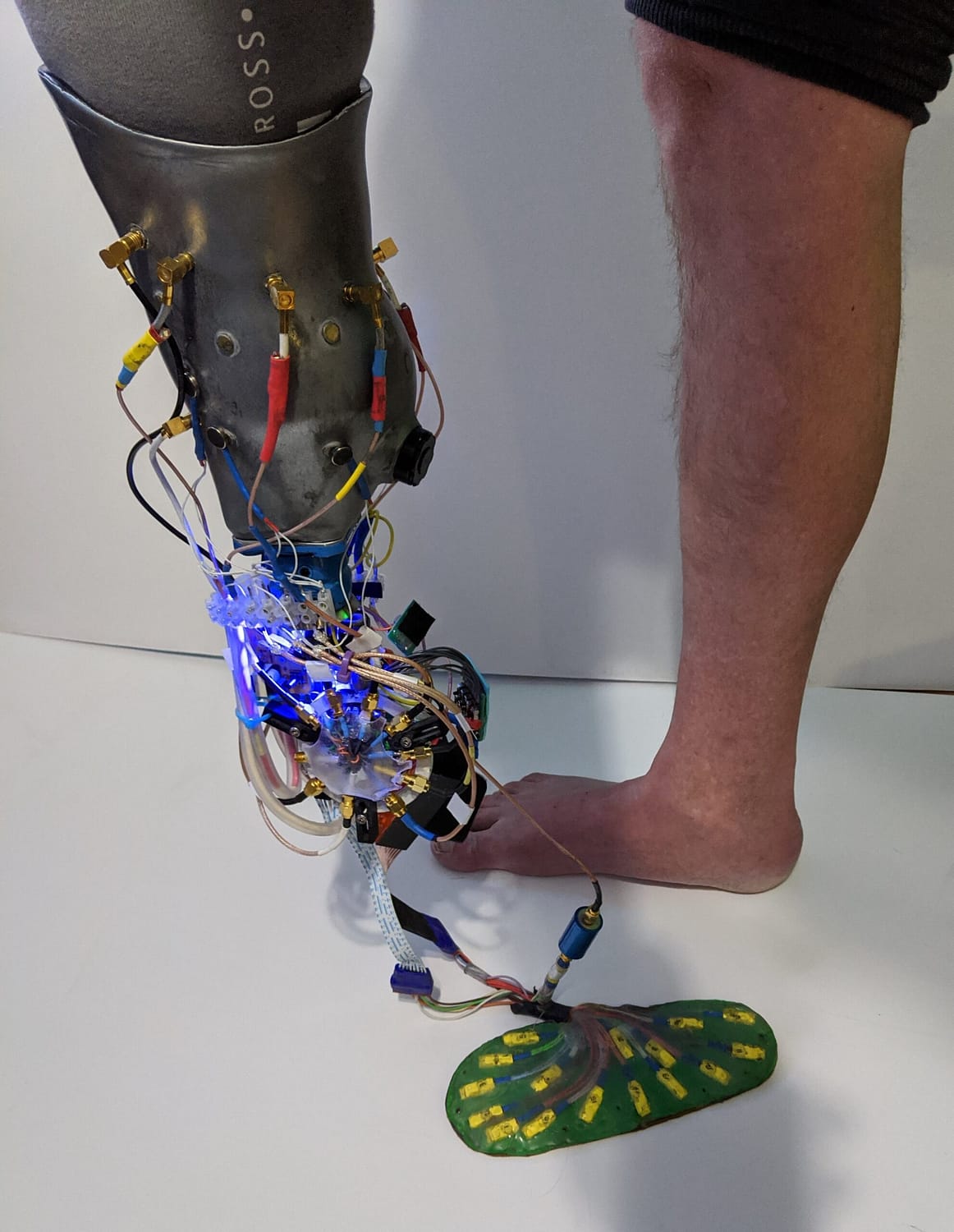
The development of bionic and cybernetic systems illuminates new potentials for the future of non-invasive, networked, neuro-muscular stimulation. In 2017 I was the third patient to undergo the experimental Ewing amputation (left below-knee) after a lifetime of complications from a congenital clubfoot. Since losing my leg I have been presented with a unique opportunity to re-engineer my body. I designed and built this full-stack 16-channel prototype as a platform to regain dynamic feedback from my environment (and yes, I realize the irony that, as the father of a four-year-old, I have now restored my ability to feel it when I step on LEGOs).