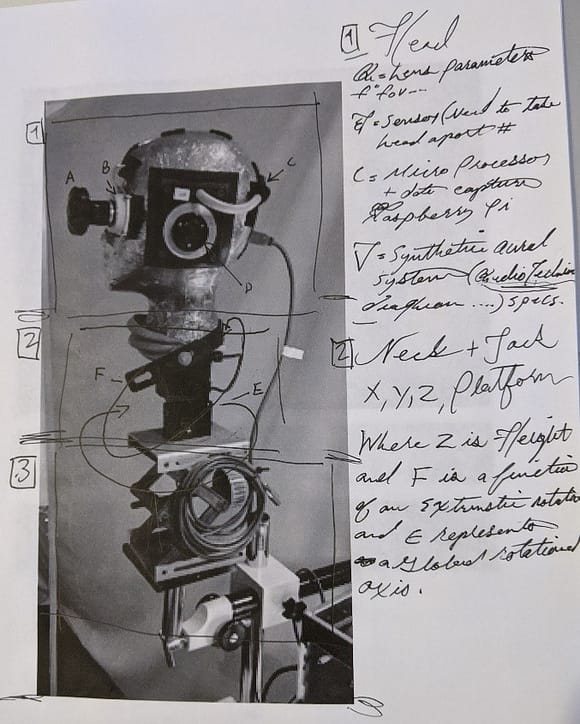
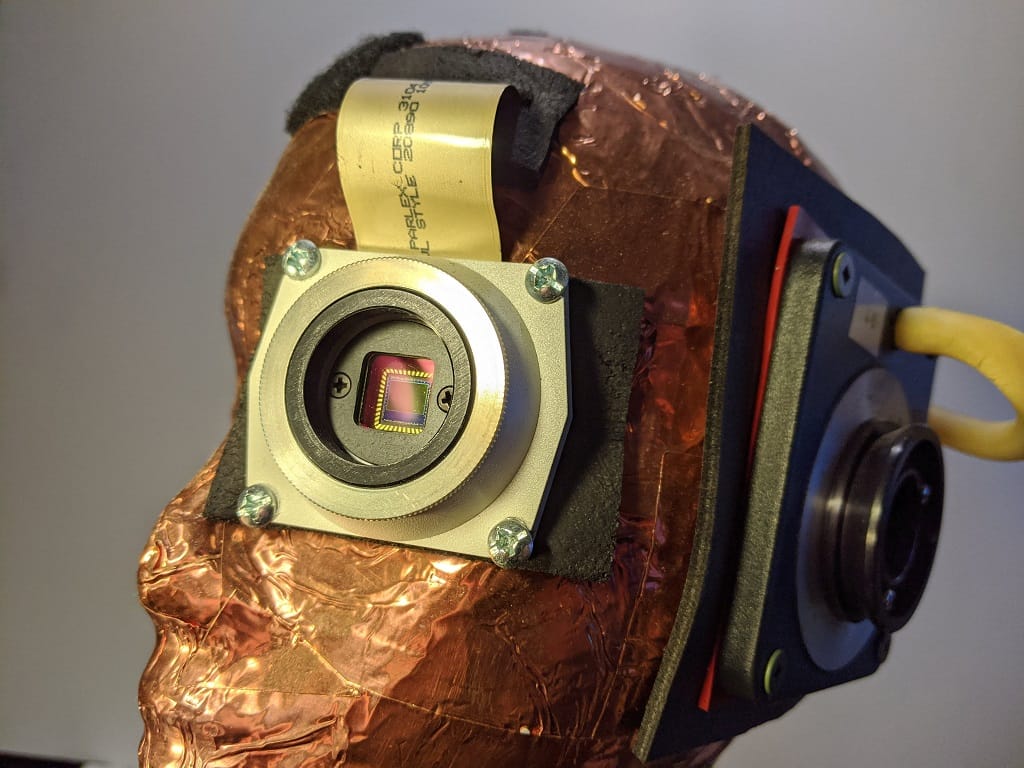
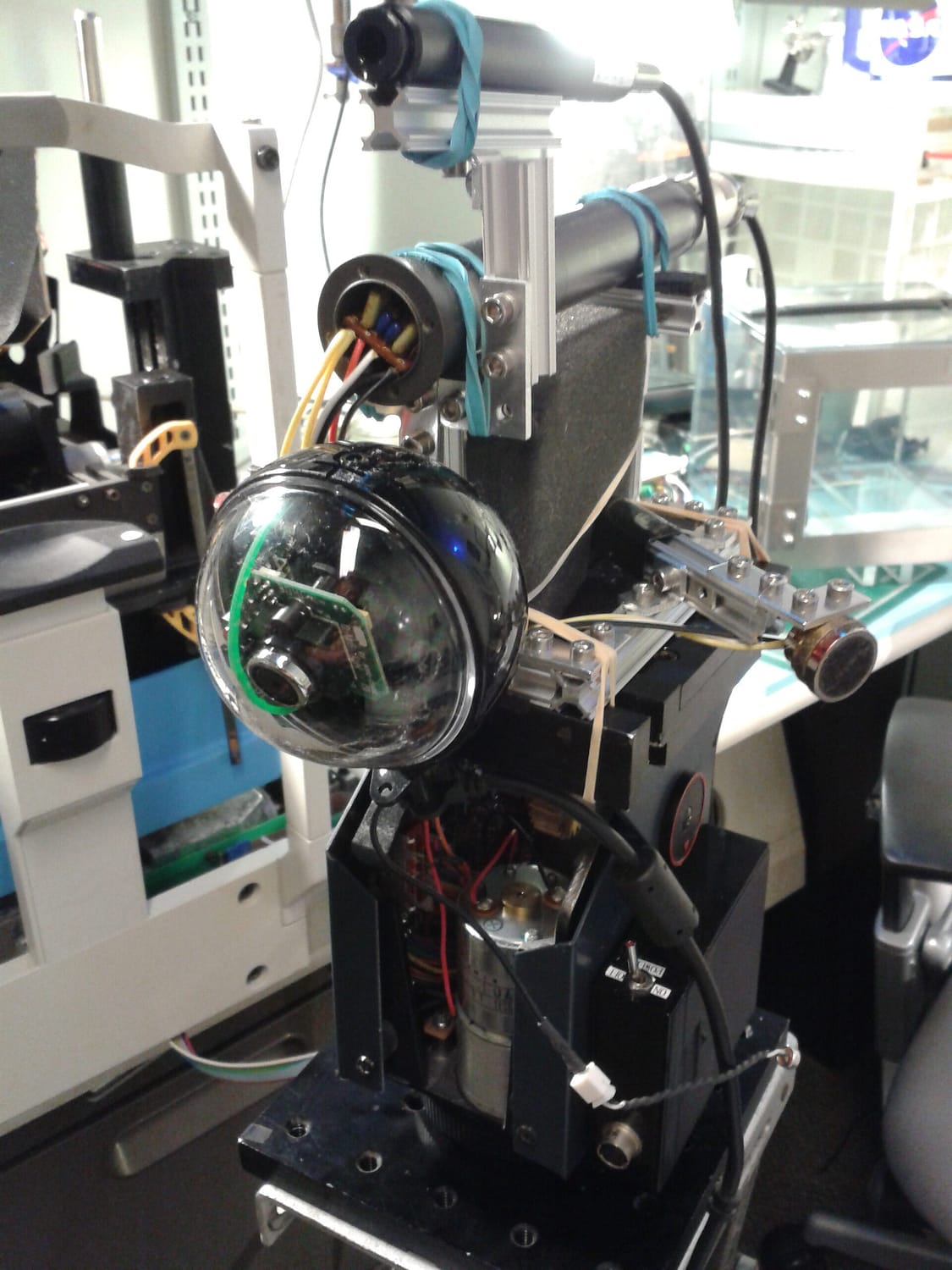
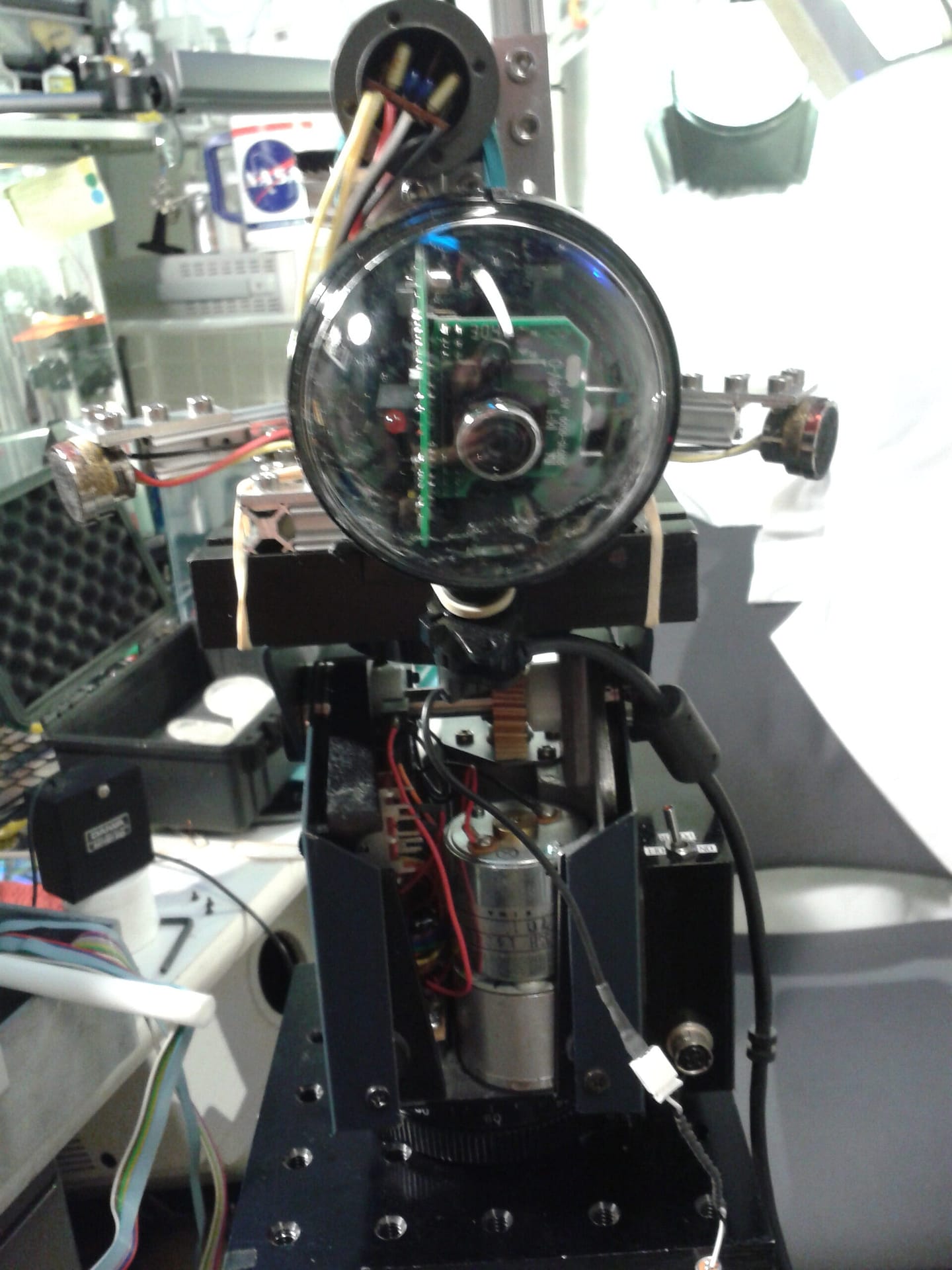
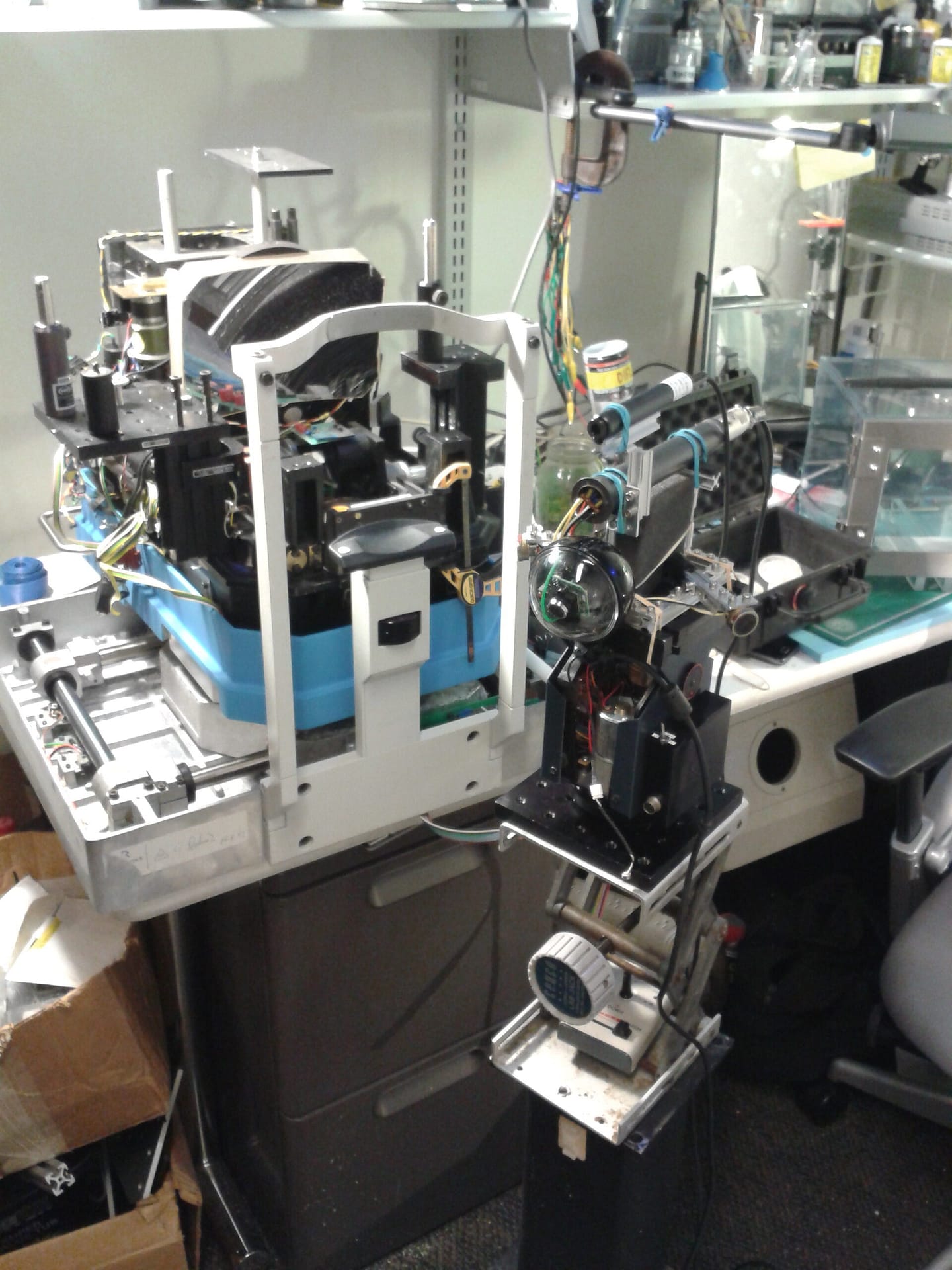
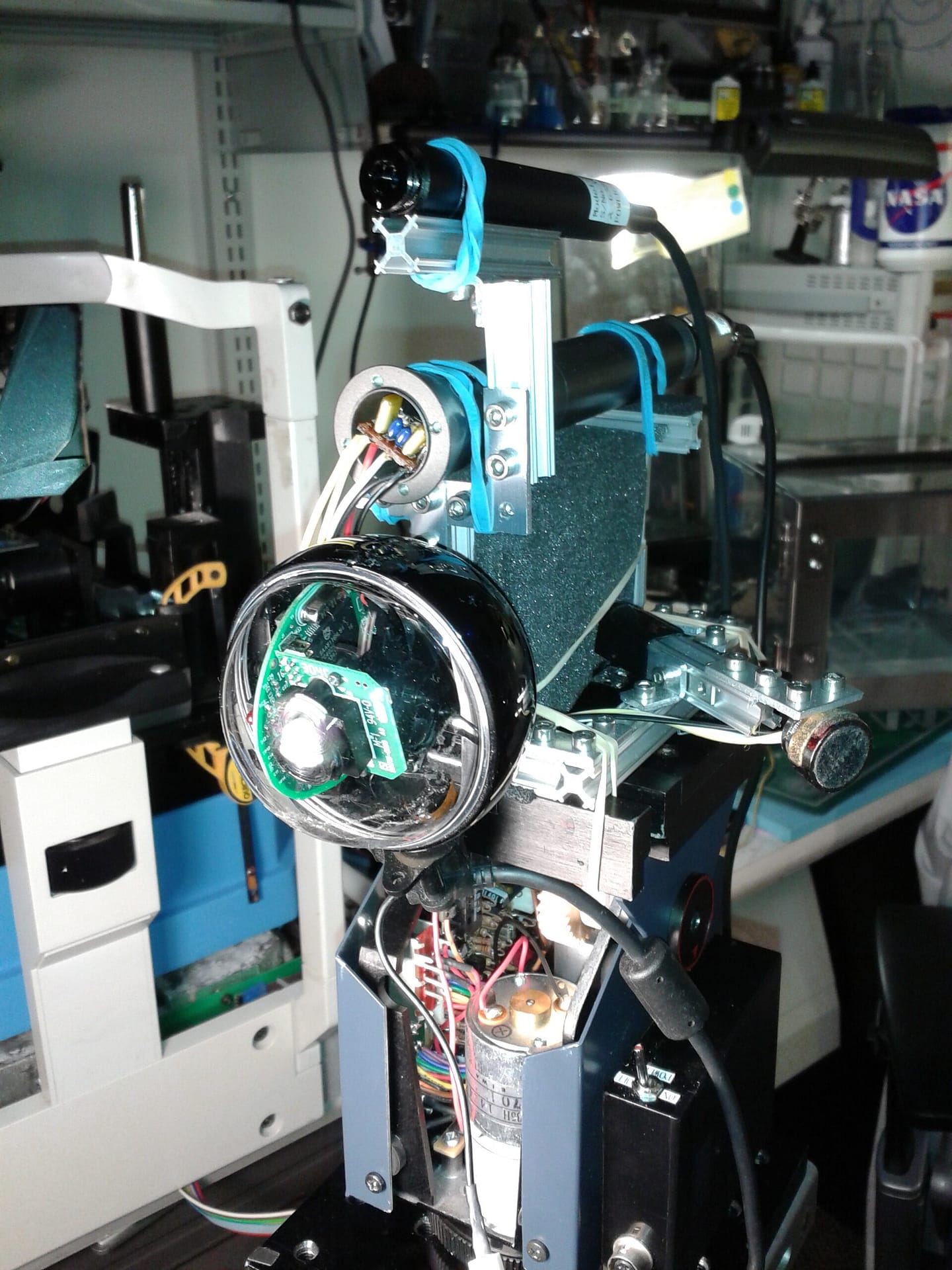
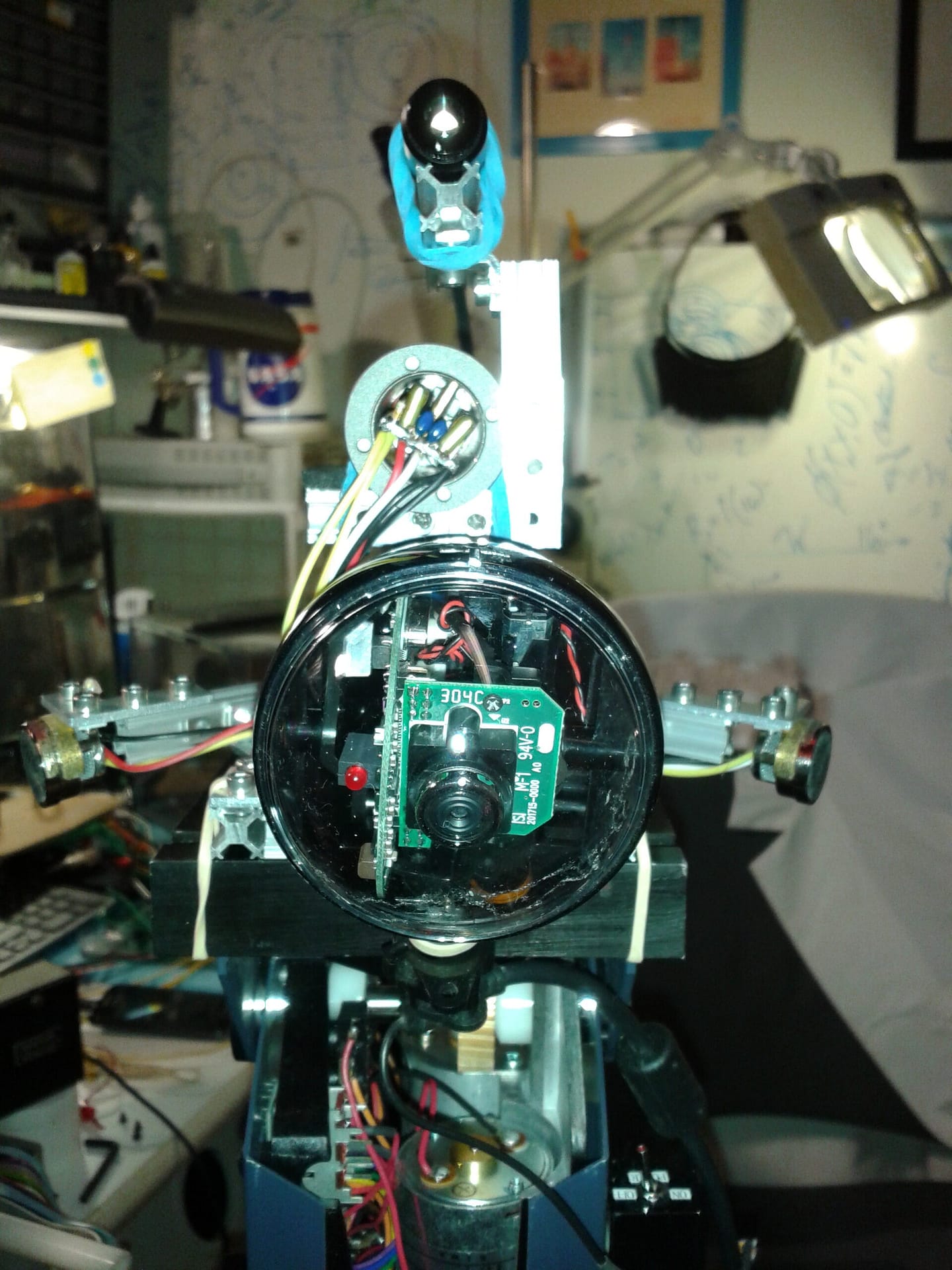
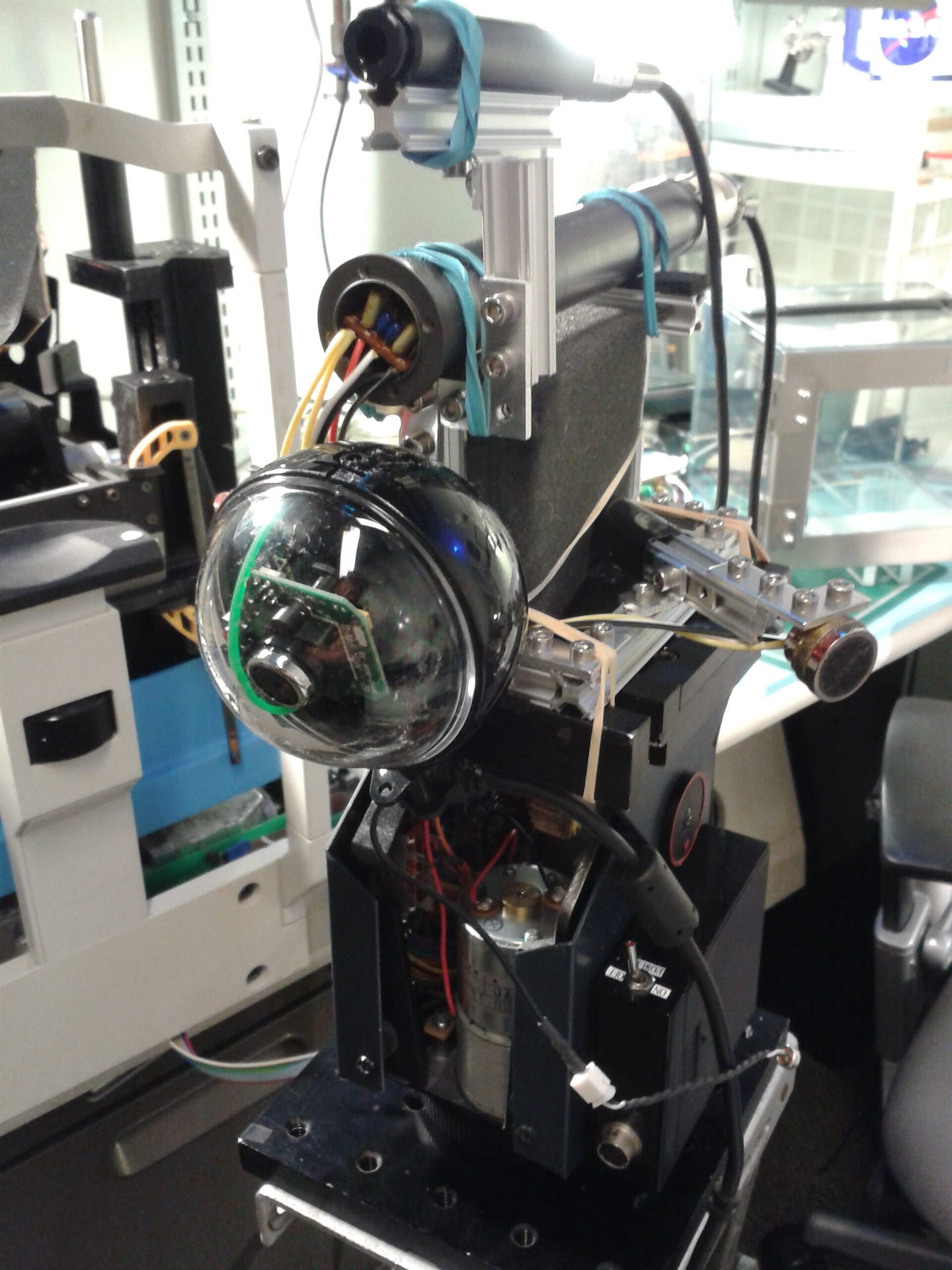
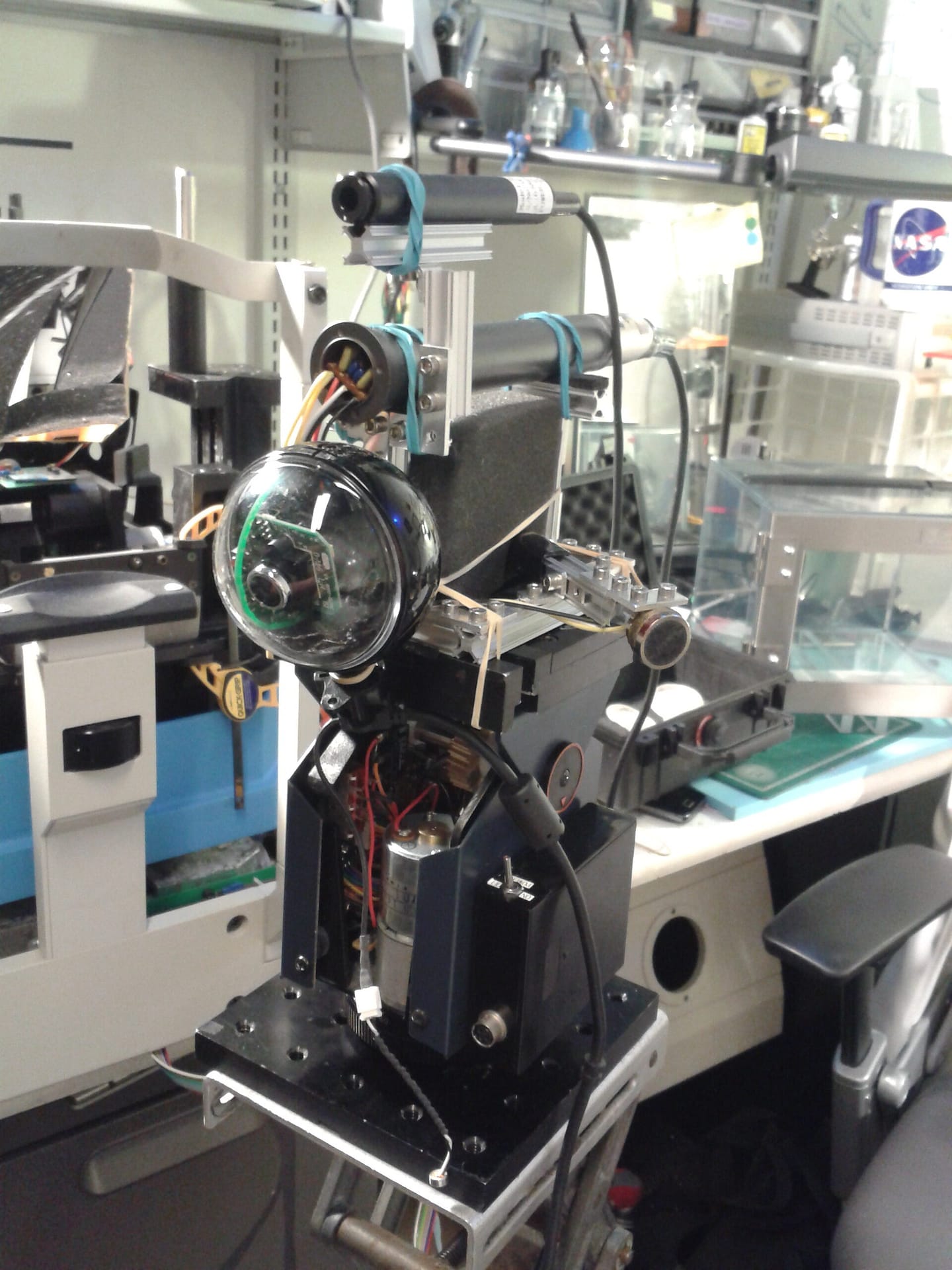
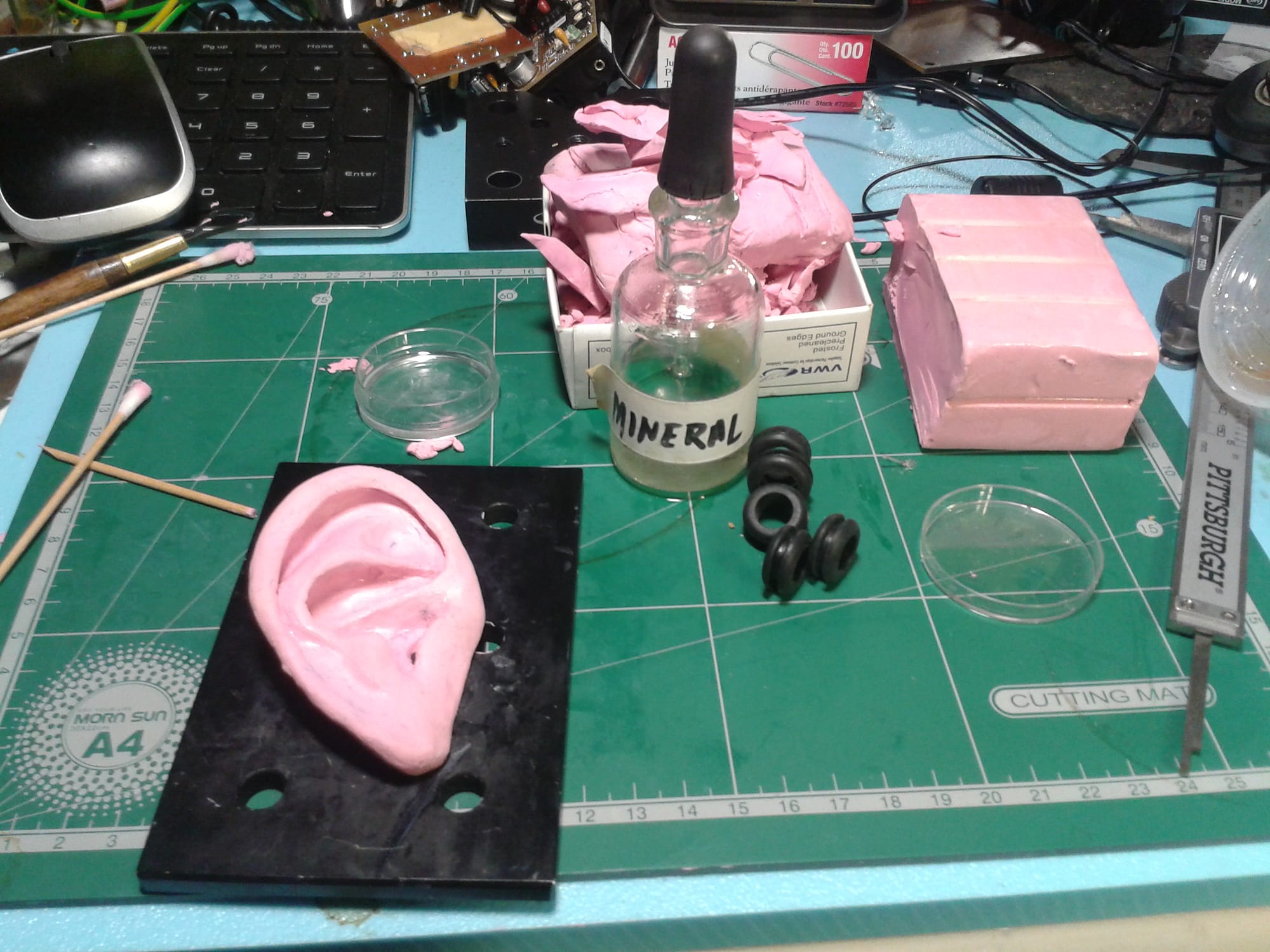
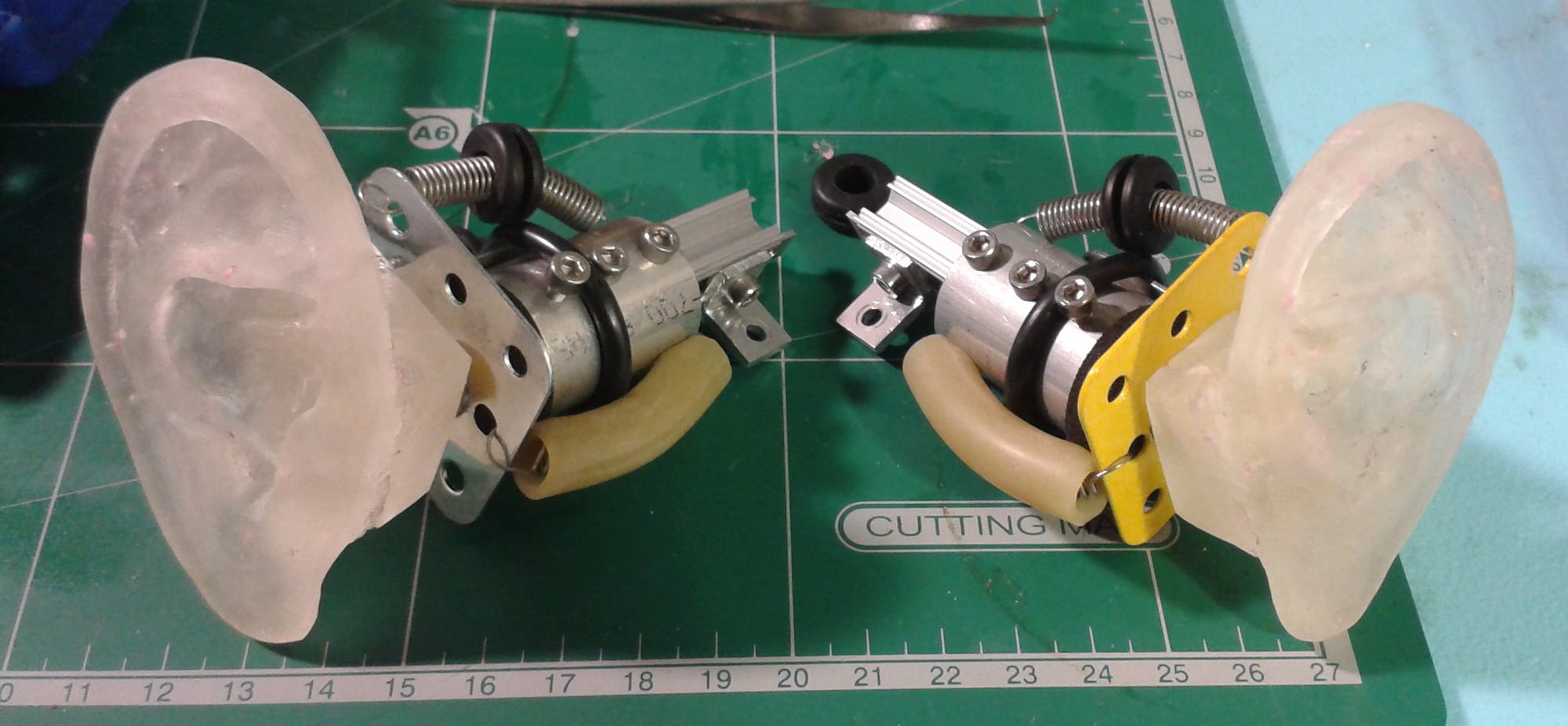
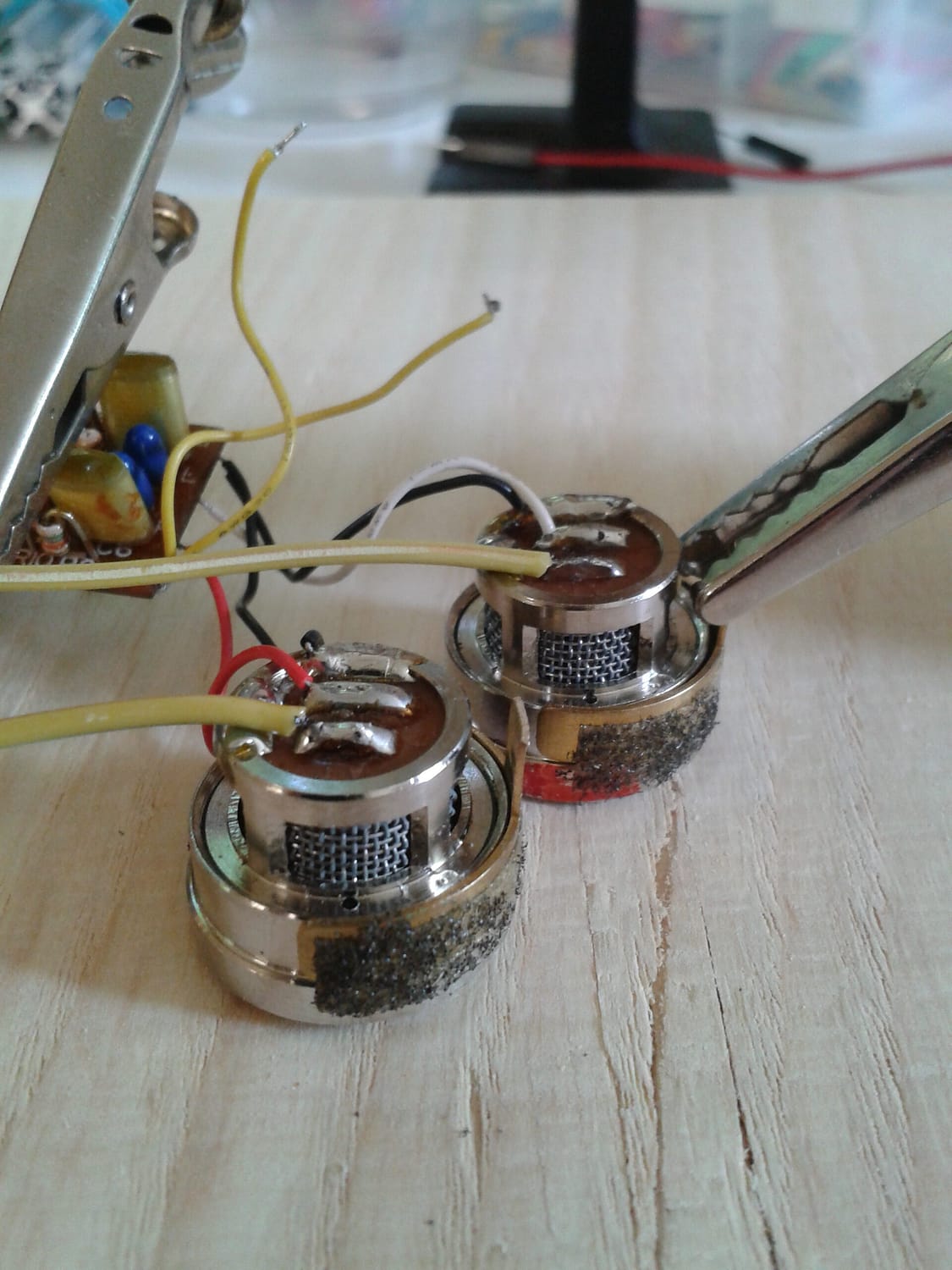
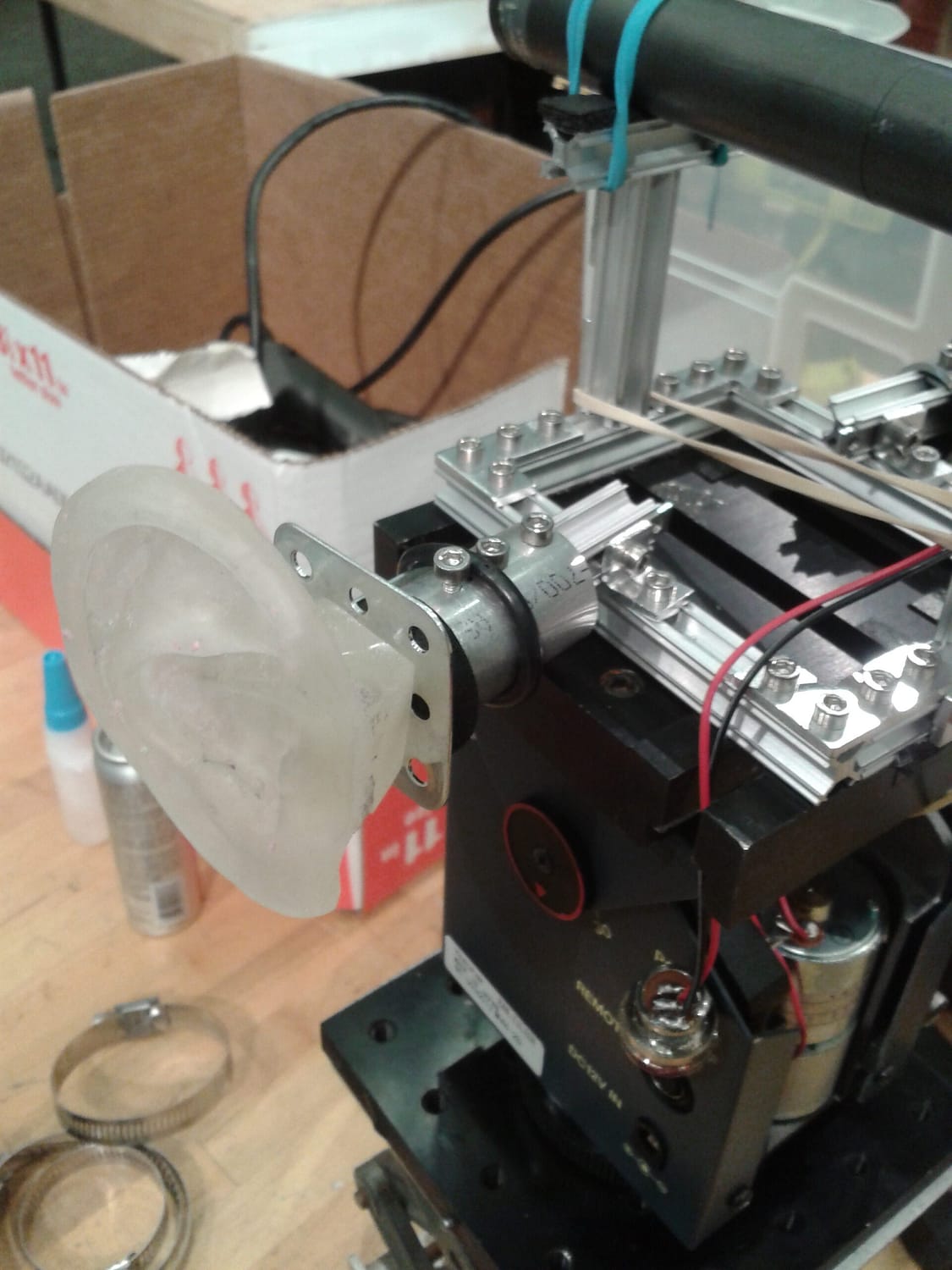
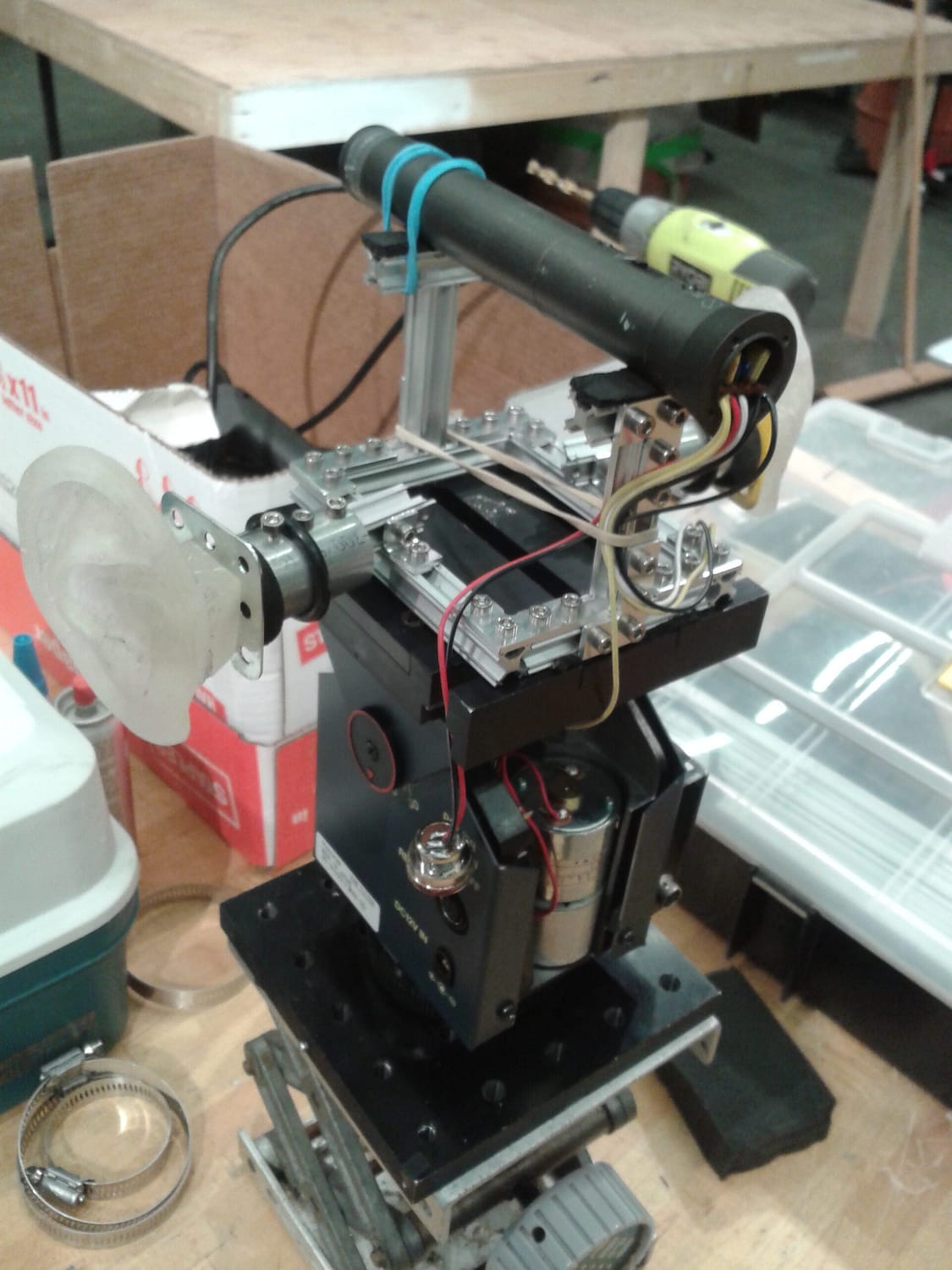
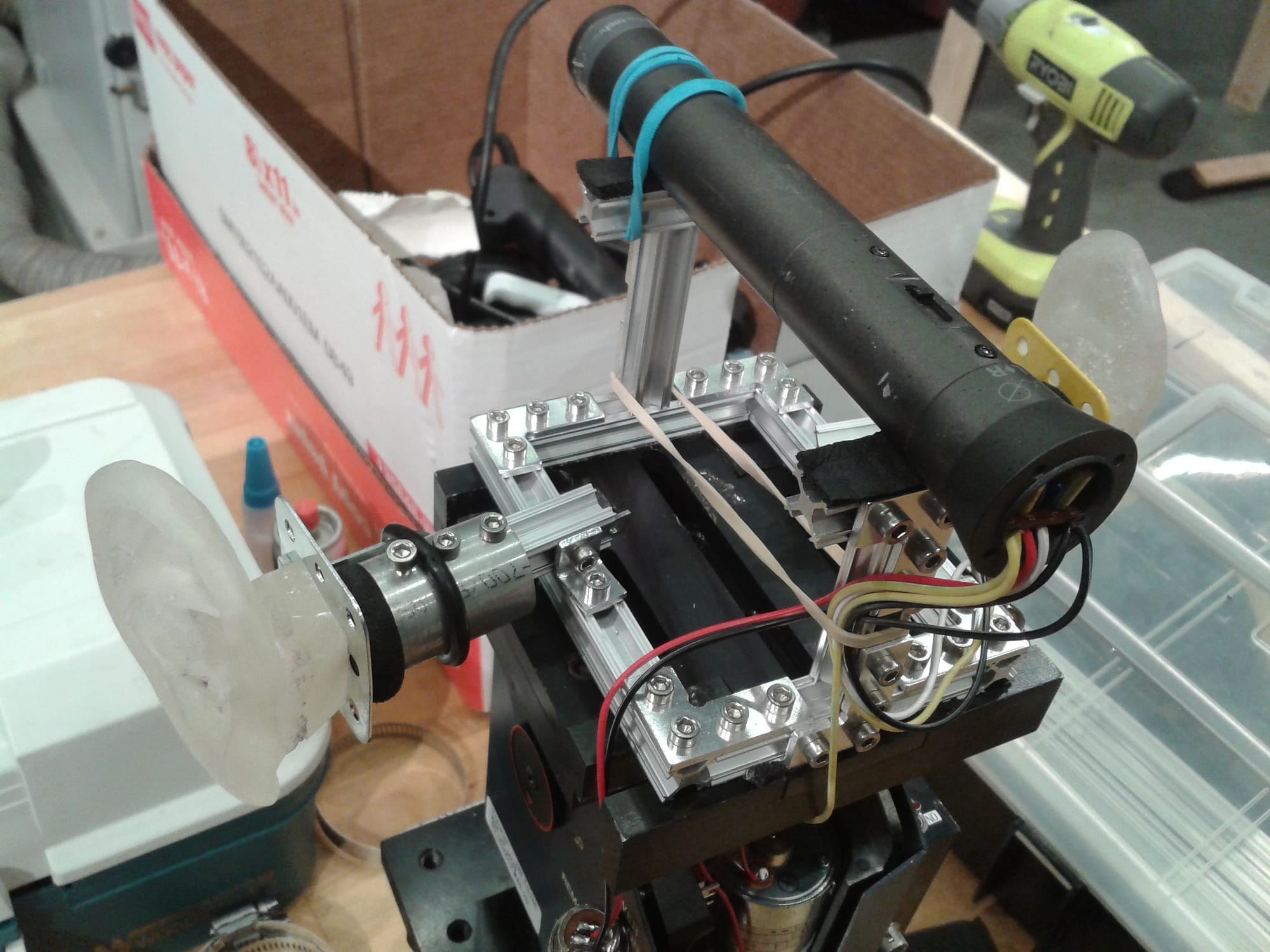
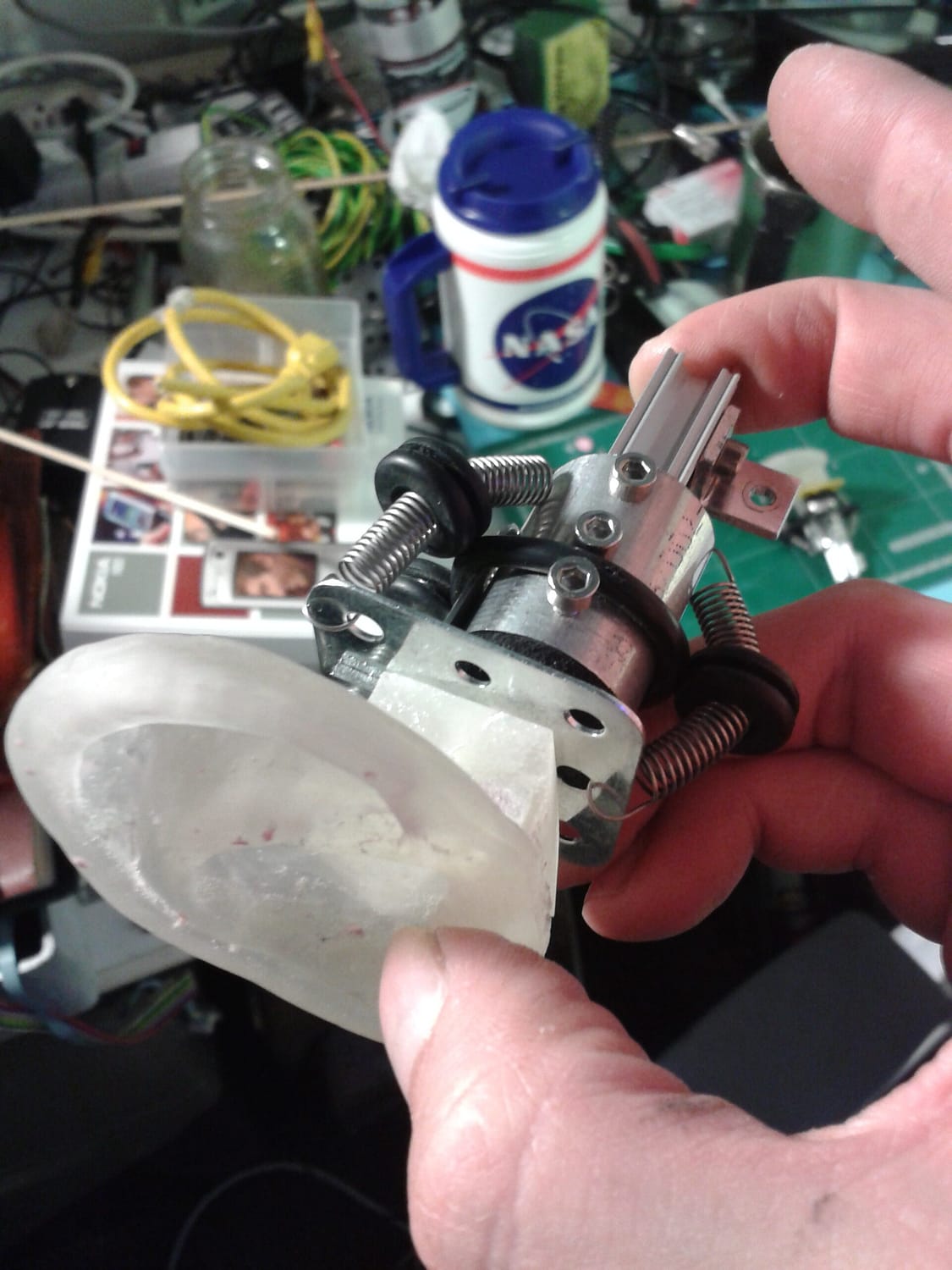
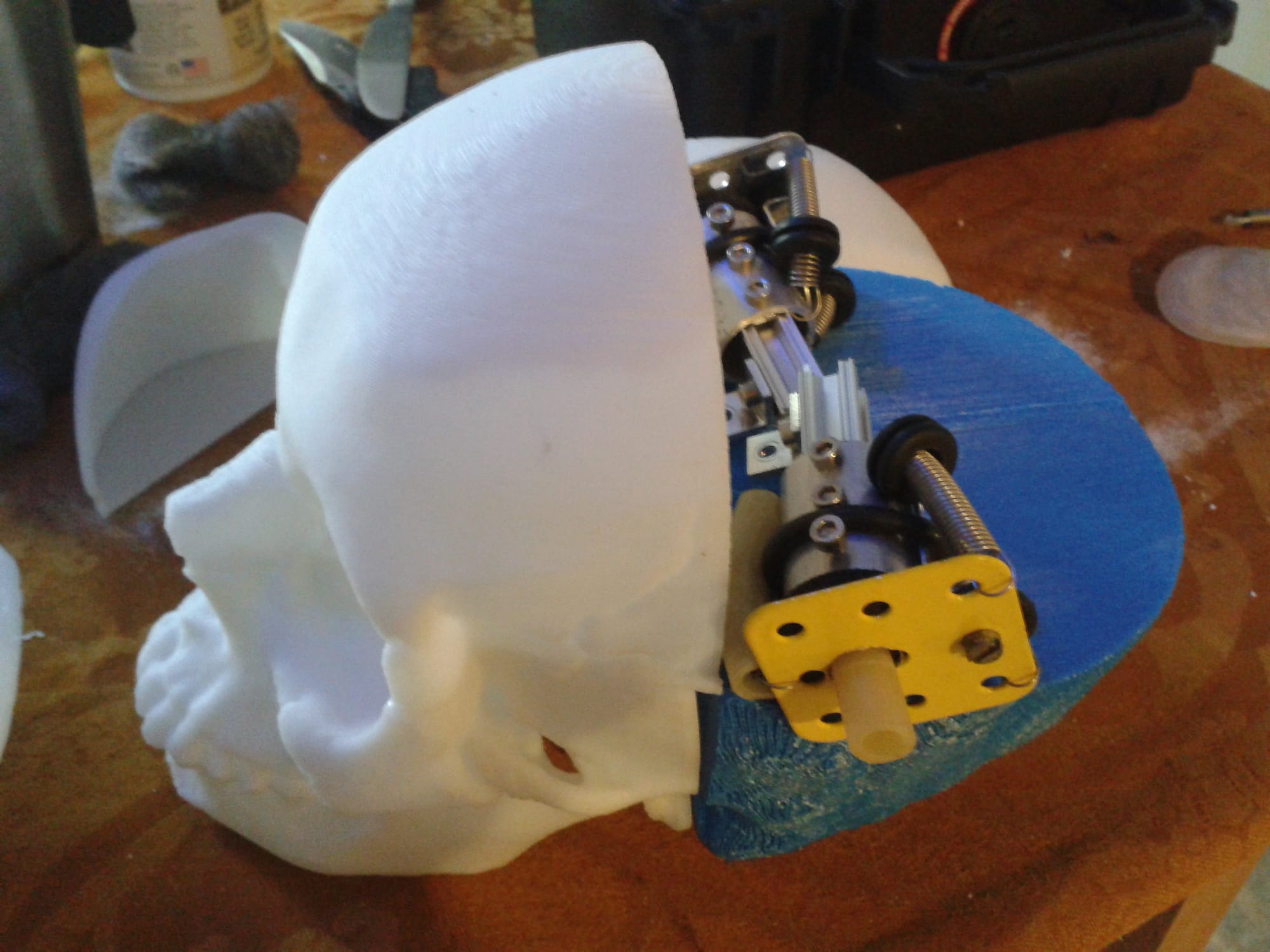
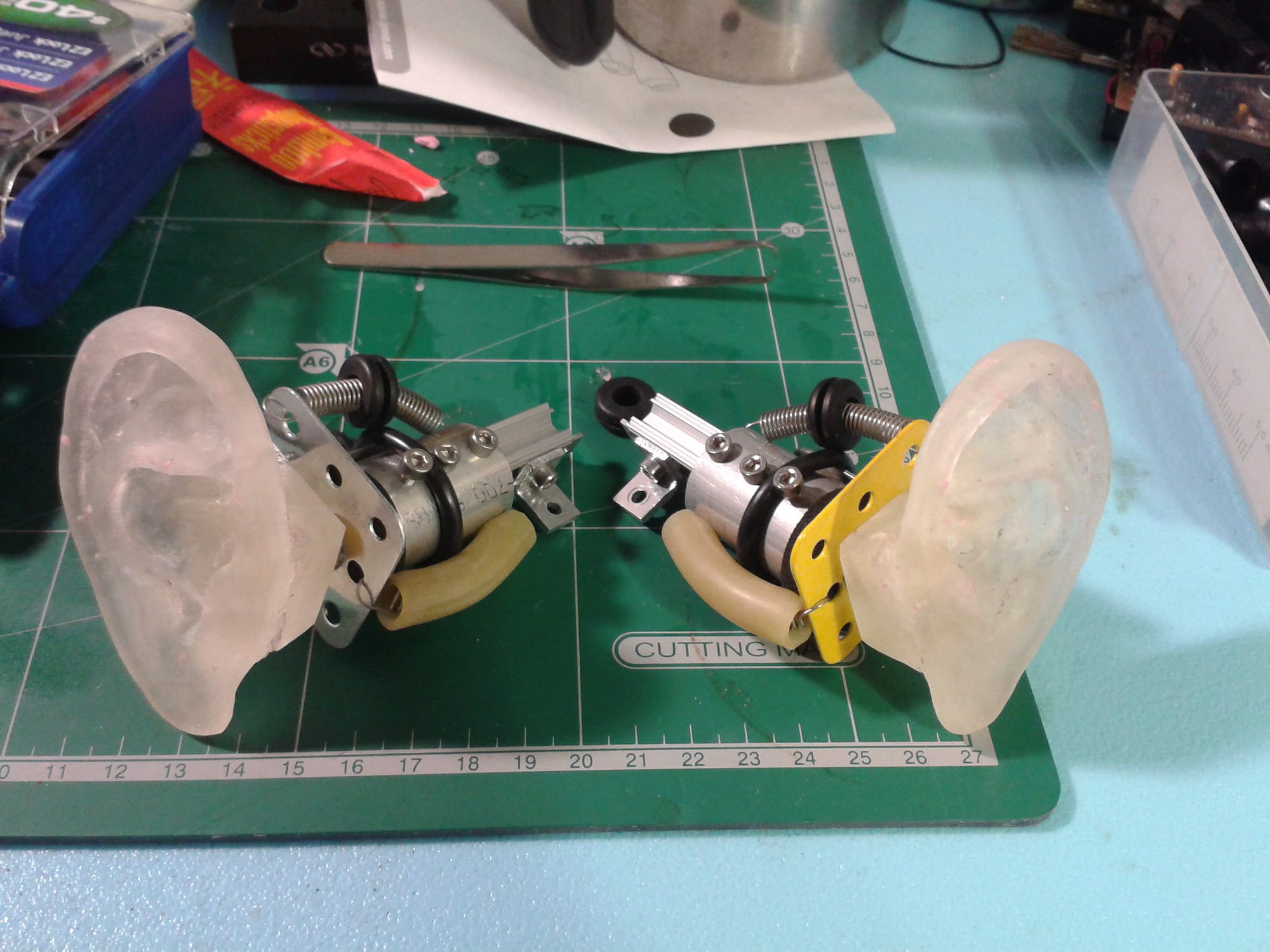
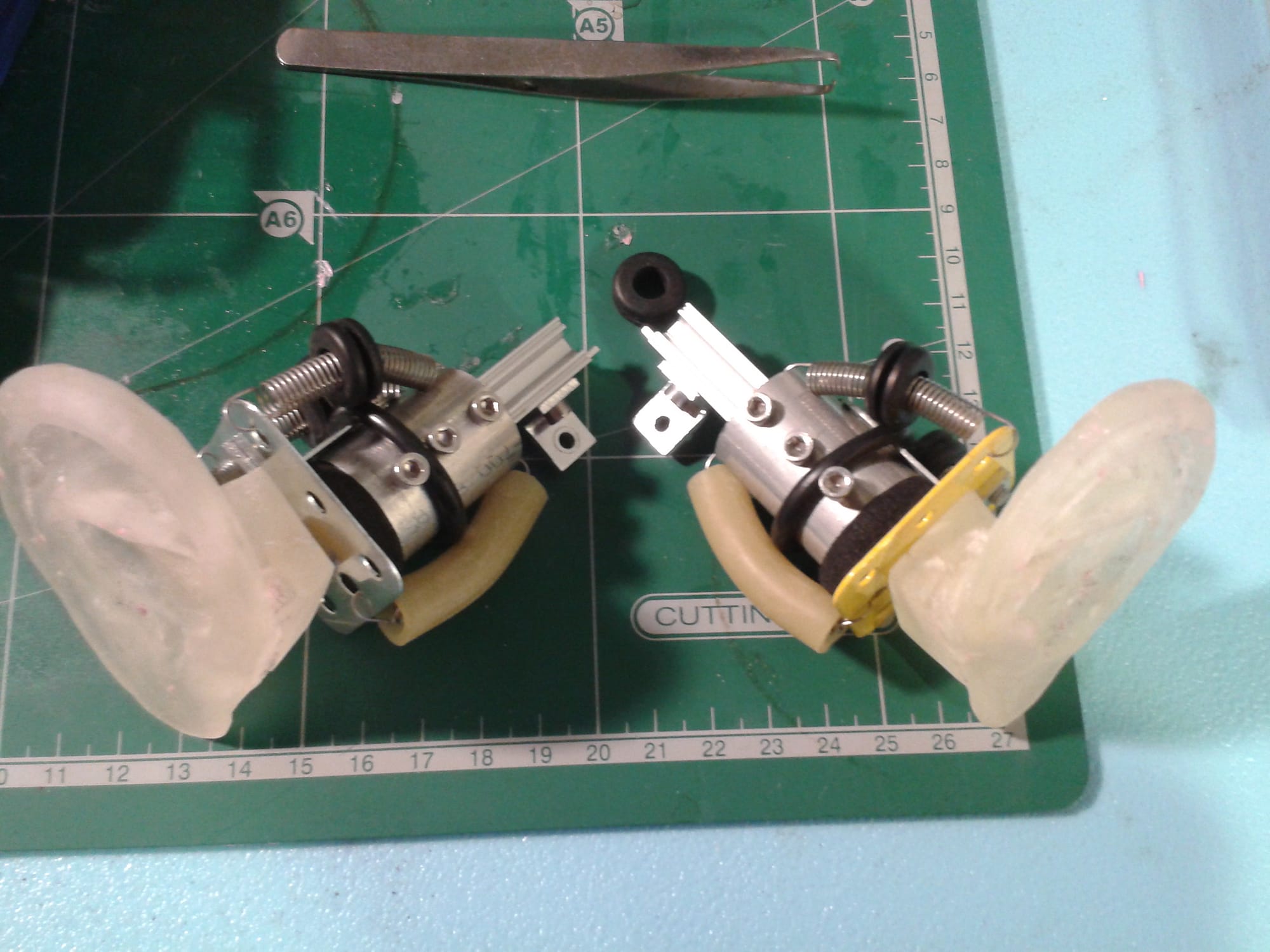
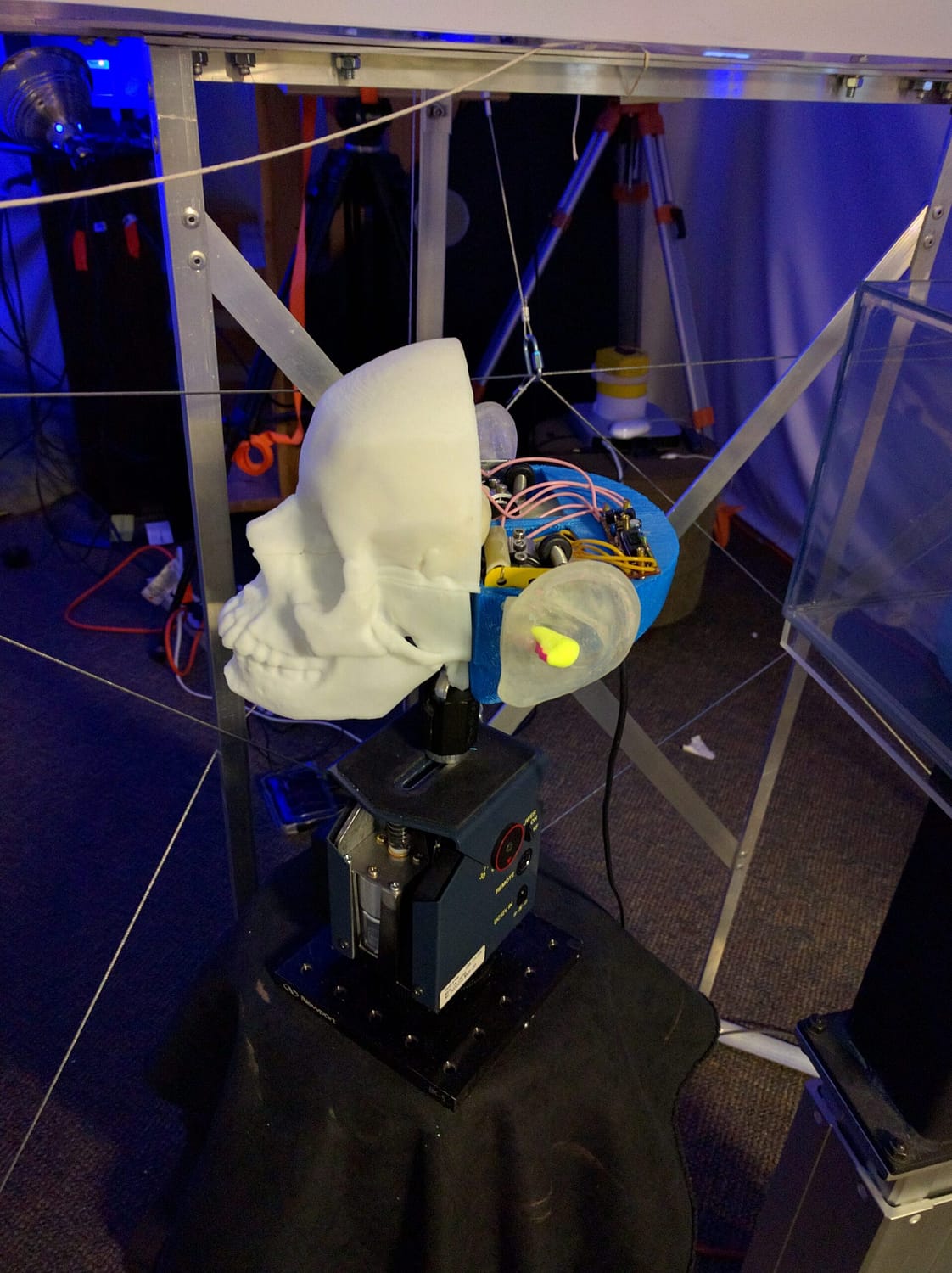
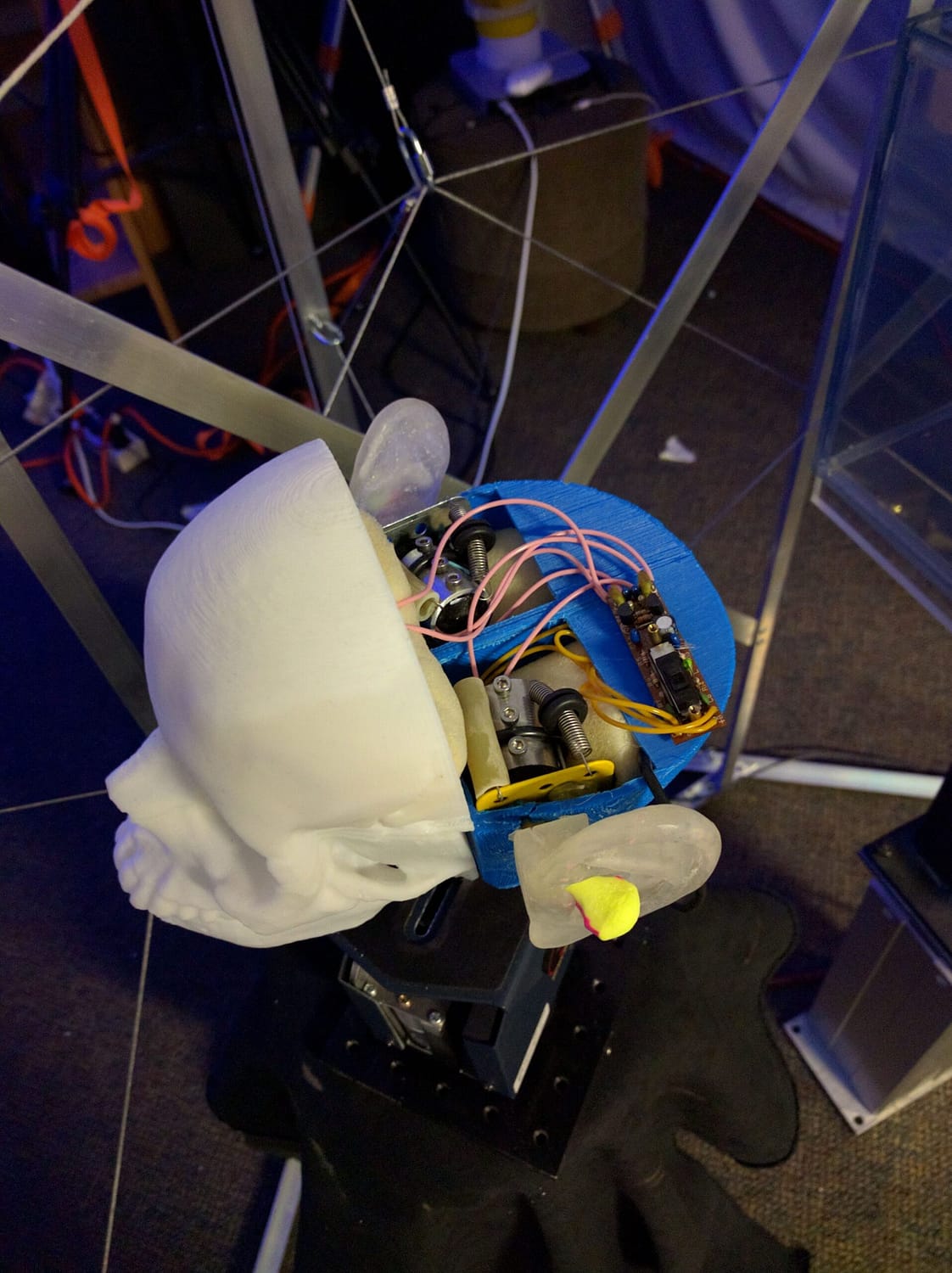
Quantizing visual perception as an expression of experience is referentially viewed as a modular function, temporally sequenced within multiple sensory inputs that operate largely as separate and independent channels in the first cascade of interaction. Throughout the course of my dissertation, I dedicated a year towards the development, engineering, and articulation of humanoid robots with biomimetic sensory capabilities to evaluate multi-sensory chordance between sight, sound, and environment. These robotic systems were specifically built to function in the field for real-time data capture toward developing new cybernetic interventions for augmenting human sensory experience.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}