



Excerpts: codex metrics, results in controlled environments
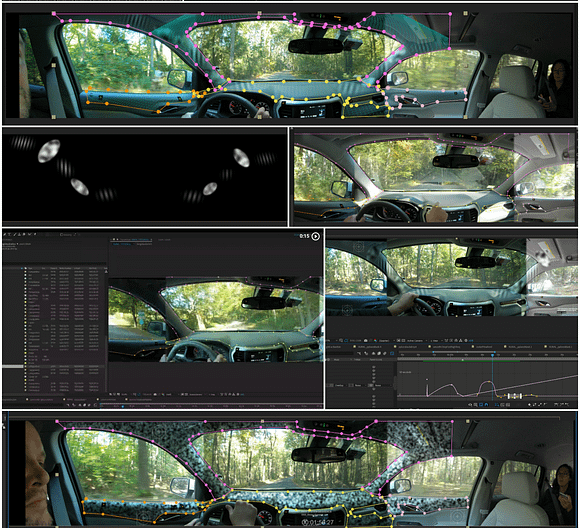
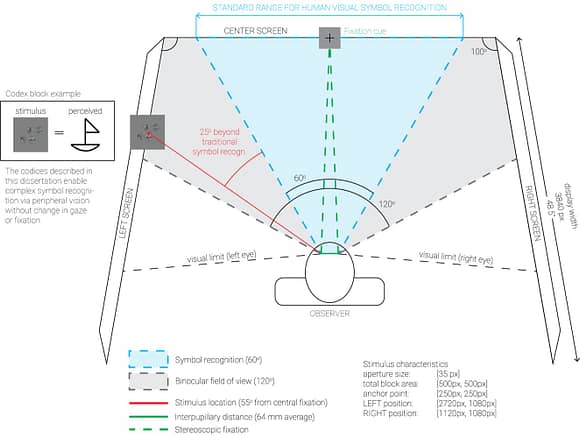
Metrics of symbol recognition speed and accuracy in a controlled environment, with codex parameterization using motion energy analysis
Excerpts: increasing environmental complexity, human subject trials
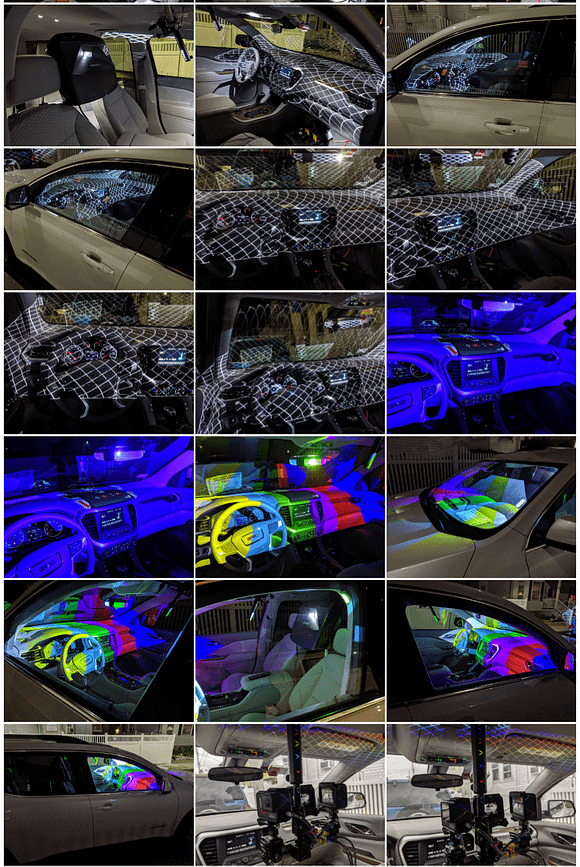
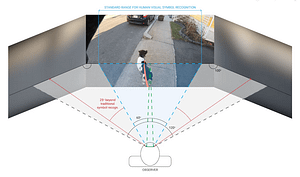
How detectable are far peripheral semantic cues in increasingly dynamic environments? Results show rapid adaptation and high detection accuracy.