
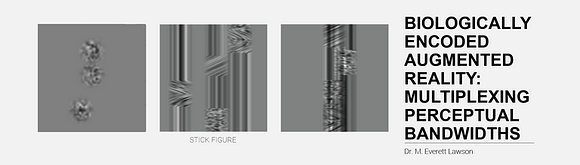
Excerpts: peripheral semantics (codex overview)
This research demonstrates a foundational approach to peripheral semantic information delivery capable of conveying highly complex symbols well beyond the established mean, using motion-modulated stimuli within a series of small, static apertures in far periphery ( > 50°).

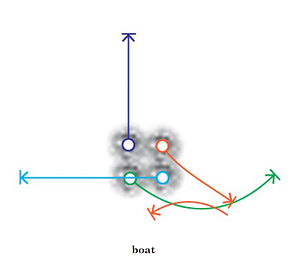
Excerpts: stimulus preparation
Adapting stimuli to dynamic environments One of the greatest challenges of adapting motion-modulated semantics to real-world environments is maintaining requisite conditions for effects to occur.

Outfitting real-time cockpit environment with adaptive perceptual skins
Information floods the center of our visual field and often saturates the focus of our attention, yet there are parallel channels in the visual system

Excerpts: codex metrics, results in controlled environments
Metrics of symbol recognition speed and accuracy in a controlled environment, with codex parameterization using motion energy analysis
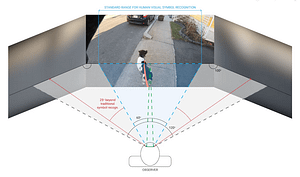
Excerpts: increasing environmental complexity, human subject trials
How detectable are far peripheral semantic cues in increasingly dynamic environments? Results show rapid adaptation and high detection accuracy.
Excerpts: peripheral semantics (codex overview)
This research demonstrates a foundational approach to peripheral semantic information delivery capable of conveying highly complex symbols well beyond the established mean, using motion-modulated stimuli within a series of small, static apertures in far periphery ( > 50°).
Excerpts: stimulus preparation
Adapting stimuli to dynamic environments One of the greatest challenges of adapting motion-modulated semantics to real-world environments is maintaining requisite conditions for effects to occur.
Outfitting real-time cockpit environment with adaptive perceptual skins
Information floods the center of our visual field and often saturates the focus of our attention, yet there are parallel channels in the visual system
Excerpts: codex metrics, results in controlled environments
Metrics of symbol recognition speed and accuracy in a controlled environment, with codex parameterization using motion energy analysis
Excerpts: increasing environmental complexity, human subject trials
How detectable are far peripheral semantic cues in increasingly dynamic environments? Results show rapid adaptation and high detection accuracy.